Kuruluş Amacı
Laboratuvarın temel amaçları:
Elektrik-Elektronik Mühendisliği lisans eğitiminde 7. yarıyılda açılan teknik seçmeli Robotik dersinin uygulamalarına destek vermek,
Öğrencilere endüstriyel robotların tanıtımlarını yapmak, uygulamalı olarak robot donanımı, çevresel iletişimi ve programlanmasını öğretmek,
Lisans öğrencilerinin Tasarım Projesi I-II dersleri için çalışma imkanı ve ortamı sağlamaktır. Birden fazla firmanın endüstriyel robotlarını bünyesinde barındıran bölümümüzdeki bu ders kapsamında öğrencilerimiz endüstrideki robotları rahatlıkla kullanabilecek düzeye gelmektedirler.

Genel Bilgiler
Endüstriyel robotun en kapsamlı tanımı ve robot tiplerinin sınıflandırması ISO 8373 standardına göre “Endüstriyel uygulamalarda kullanılan, sabit veya hareketli olabilen, üç veya daha fazla programlanabilir eksene sahip, otomatik kontrollü, yeniden programlanabilir çok amaçlı manipülatördür.” olarak ifade edilmiştir.
EN 10218-1 Avrupa Standardına göre Endüstriyel Robotun tanımı; “Robot/Endüstriyel Robot, üç veya daha fazla aksta programlanabilen ve otomasyon teknolojisinde kullanım için sabit bir yere takılarak veya hareketli olarak kullanılabilen, otomatik olarak kontrol edilebilen, serbest olarak programlanabilen çok amaçlı manipülatördür.” olarak yapılmaktadır.
Otomasyon, işlem ve üretim kontrolünde insan müdahalesi olmadan veya azaltılmış olarak mekanik, elektrik, elektronik ve bilgisayar tabanlı kısaca mekatronik sistemlerin birlikte kullanılarak işlemlerin otomatik olarak yürütülmesidir. Sahip oldukları özellikler sayesinde endüstriyel robotlar, otomasyon sistemlerinin vazgeçilmez unsurlarından olmuşlardır.
Endüstriyel Robotlar 3 temel unsurdan oluşmaktadırlar;
1. Manipülatör (Endüstriyel Robot Kolu)
2. Kontrolör (Kontrol Ünitesi)
3. El Tipi Eğitim Ünitesi (El Paneli/Teach Box/Teach Pendant).
Laboratuvarımızda Mevcut Endüstriyel Robotlar
KUKA VKR 125/2 Endüstriyel Robotu
KUKA VKR125/2 Endüstriyel Robotu bölümümüze Tirsan Kardan A.Ş. tarafından hibe edilmiştir ve eğitim faaliyetlerimizde aktif olarak kullanılmaktadır. 1999 yılında üretilen bu robot, 125 kg yük taşıma kapasitesine sahiptir. Robotun kontrol ünitesi (V)KRC1 olarak isimlendirilmektedir. 6 serbestlik derecesine sahip olan bu robot, ±0,2 mm tekrarlanabilirlik hassasiyetine ve maksimum 1600 mm erişim mesafesine sahiptir. Robot, istenilen prosese göre programlanabildiği gibi, kontrol paneli üzerinden klavye ve 6 yönlü joistik (fare) yardımıyla da manuel olarak kontrol edilebilmektedir.
Aşağıda robota ait görseller yer almaktadır.

Mitsubishi Electric MELFA RV-2F-D Serisi Endüstriyel Robotu
Mitsubishi Electric MELFA RV-2F-D endüstriyel robotudur. Robot, 6 serbestlik derecesine sahip olup, taşıma kapasitesi 2 kg’dır. Tekrarlanabilirlik hassasiyeti +/- 0.02mm olan robotun, maksimum erişim mesafesi 504mm, maksimum çalışma hızı 4,955 m/sn, ve çevrim süresi ise 0.6sn’dir. IP30 koruma sınıfına sahip olan bu robotun zemine, tavana veya duvara montaj imkanları mevcuttur. Ders ve eğitim faaliyetleri kapsamında laboratuvarımızda robot için hazırlanmış bir stand içine monte edilen bu robot için güvenli bir çalışma ortamı oluşturulmuştur. Ayrıca robotun kontrol ünitesi üzerindeki slotlara bağlanan 2D-TZ378 birimi ve 2D-CBL05 kablosu vasıtasıyla, 16 dijital giriş ve 16 dijital çıkış kullanıcının kontrolüne sunulmuştur. Bu kapsamda buton, sensör, kontaktör, uyarı lambası gibi çevre birimlerin de robot ile birlikte kullanılabilmesi mümkün hale getirilmiştir. Robotun tool kısmına monte edilen gripper ile birlikte, istenilen prosese göre program yazılabilmekte ve uygulamalar gerçekleştirilebilmektedir.
Aşağıda robota ait görsel yer almaktadır.

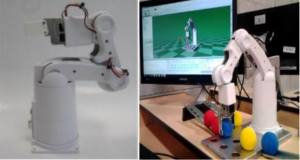
Denso 7 – Axis Acedemic Robot
Denso 7-Axis Acedemic manipülatörünün eklemlerini hareket ettirmek için altı titreşim orantılı servo motor kullanılmıştır. Bu motorlar radyo kontrollü araba uçak ve bot için tasarlanmış motorlardır. Denso 7-Axis Acedemic robotta FUTABA RS303MR, RS304MD servo motorları kullanılmıştır. Endüstriyel robot programının yanı sıra C++, C#, VB, Java ortamlarında geliştirilen kodlar ile de kontrol edilebilmektedir. Denso akademik robotu, LabVIEW veya MATLAB/Simulink ortamlarında geliştirilen kontrol algoritmalarıyla da uyumlu çalışabilmektedir.
Aşağıda robota ait görseller yer almaktadır.
Laboratuvar Çalışanları
Prof. Dr. Sezai TAŞKIN (Laboratuvar Sorumlusu)
Araş. Gör. Bilal KARAMAN (Robotik Dersi Yrd. Öğretim Elemanı)
İletişim Adresi ve Telefonu
Adres : Manisa Celal Bayar Üniversitesi Mühendislik Fakültesi, Elektrik-Elektronik Mühendisliği Bölümü, Şehit
Prof. Dr. İlhan Varank Yerleşkesi
45140 Yunusemre-Manisa
Tel : 0-236-201 2160
E-mail: sezai.taskin@cbu.edu.tr


NOT: Laboratuvarımızda yer alan endüstriyel robotların tanıtımlarını, programlanmasını ve deney uygulamalarını içeren dokümanlara aşağıdaki linklerden erişebilirsiniz.
1. http://sezaitaskin.cbu.edu.tr/wp-content/uploads/2020/02/EEM_4216_ROBOT%C4%B0K_DENEY_F%C3%96Y%C3%9C.pdf
2. http://sezaitaskin.cbu.edu.tr/wp-content/uploads/2016/03/Robotik_KUKA_DENSO.pdf